智能吸尘器设计 智能吸尘器的开发
随着社会的进步和发展,人们的学习、工作越来越繁忙,于是怎样更大程度地将人们从烦琐的日常事物中解脱出来,就成了新一代家电所追求的目标。而智能化正是这一目标的集中体现。本文介绍的智能吸尘器初步实现了无人情况下的自主工作方式,很大程度地提高了产品的自动化水平。
1 总体原理
该智能吸尘器利用了超声波测距的原理,通过向前进方向发射超声波脉冲,并接收相应的返回声波脉冲,对障碍物进行判断;通过以单片机为核心的控制器实现对超声发射和接收的选通控制,并在处理返回脉冲信号的基础上加以判断,选定相应的控制策略;通过驱动器驱动两步进电机,带动驱动轮,从而实现避障功能。与此同时,由其自身携带的小型吸尘部件,对经过的地面进行必要的吸尘清扫。
2 功能实能
整个吸尘器原理上可以分为五个主要部分(如图1):传感器部分、控制器部分、驱动部分、吸尘部分和电源部分。各部分的原理及具体功能实现如下:

2.1 传感器部分
2.1.1 超声波测距原理
超声波是一种一定频率范围的声波。它具有在同种媒质中以恒定速率传播的特性,而在不同媒质的界面处,会产生反射现象。利用这一特性,就可 以根据测量发射波与反射波之间的时间间隔,从而达到测量距离的作用。其具体的计算公式如下:
s=v×t/2
其中,s为障碍物与吸尘器之间的距离;t为发射到接收经历的时间;v为声波在空气中传播的速度。由于v的值受温度的影响会波动,因此,在实际的应用中可以用以下公式来加以补偿,其中T表示空气的绝对温度,m/s为速度单位。

在智能吸尘器中,避障功能的实现正是利用了这一超声波测距的原理。它的传感器部分由三对(每对包括一个发射探头和一个接收探头)共六个超声波传感头组成。由单独的振荡电路产生频率固定为40kHz,幅值为5V的超声波信号。在控制器送来的路选信号(如图1)的作用下,40kHz的振荡信号被加在超声发射探头的两端,从而产生超声信号向外发射;该信号遇到障碍物时,产生反射波,当这一反射波被接收探头接收后,根据前述测距的原理,就可以精确地判断障碍物的远近;同时,根据信号的幅值大小,也可以初步确定障碍物的大小。
2.1.2 探测范围的确定
由于每一个超声波探头都有一定的指向性(即发射或接受的空间范围),所以在测量时必然存在盲区(如图2)。因此,三对传感器必然以一定的尺寸分布在吸尘器的前端,从而使传感器测量的范围包含整个吸尘器所必须经过的空间,同时又避免探测死角(既使盲区落在须测量的范围之外)。

2.1.3 防止干扰
由于三对超声波传感探头之间的安装距离比较近,因而存在相互干扰的问题。为了解决这一问题,在设计中引进了循环扫描的方式。既循环地对每组探头施加发射和接收,当一组工作时,其余两组停止。循环周期由路选信号来控制,只有15ms(即在15ms的时间里完成一次对三组探头的扫描),因而在实际应用中很可靠。
2.2 控制部分
控制部分的核心是MC51单片机,它主要完成三个部分的任务:
· 向传感器部分(三路)分别送路选信号:当路选信号是高电频时,该路导通;反之,就截止。这样,通过路选信号,就可以完成三路信号的顺序扫描以及对发射和接收的计时功能。
· 作为控制器的核心,它要根据接收的信号(左、中、右三路)的幅值,以及从发射到接收的时间间隔,计算并判断障碍物的相对位置,大致大小。在此基础上,根据事先设定的规则,选定相应的避障措施(前进、左转、右转、后退、调头)。
· 最后,在确定了避障措施后,要向步进电机的控制器输出相应的控制脉冲,以具体实现避障。
2.3 驱动部分
驱动部分是由两个四相步进电机以及相应的驱动机构组成的。步进电机带动两驱动轮(后轮),从而推动吸尘器运动。前轮不再采用传统的双轮结构,而采用了应用非常广泛的平面轴承,这既减小了结构复杂度,又提高了转弯的灵活性(如图3)。通过改变作用于步进电机的脉冲信号的频率,可以对步进电机实现较高精度的调速。同时在对两电机分别施加相同或不同脉冲信号时,通过差速方式,可以方便的实现吸尘器前进、左转、右转、后退、调头等功能。这一设计的最大优点是吸尘器能够在任意半径下,以任意速度实现转弯,甚至当两后轮相互反向运动时,实现零转弯半径(即绕轴中点原地施转)。同时转弯的速度可通过改变单片机的程序来调节。
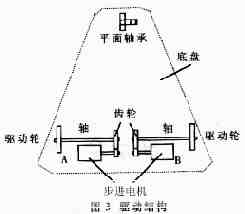
由于智能吸尘器是边行走边工作的,所以要求速度很低,一般要求5m/min左右,而步进电机为避免低速爬行,其转速又不能太低,为此,在电机轴与轮轴之间采用了一级齿轮传动,设计传动比为3.7。设电机的转速为n(转/秒),驱动轮的半径为r(米),则驱动轮的前进速度为:

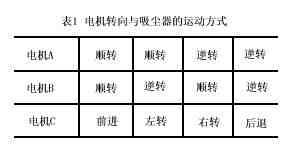
式中,vk,k=1,2,代表左右驱动轮的线速度;i——齿轮传动比。通过调节n的大小和正反,可以实现vk的连续变化,从而实现任意半径的转弯。电机转向与吸尘器的运动方式的关系如表1。
2.4 吸尘器部分
吸尘功能是由封闭在壳体中的小型吸尘器完成的。包括气泵、吸室、吸道和吸嘴。在吸尘器爬行的过程中,通过底盘上开的吸嘴将扫过的地面上的灰尘吸入吸室。
2.5 电源部分
由于智能吸尘器是以自主方式工作的,因而所用的电源不是一般拖线方式,而是采用随身携带的蓄电池(3A/20hour)。这样不但可实现无人控制,而且工作时较灵活。一次充电可以连续工作几个小时。
3 部分电路说明
3.1 超声信号发生
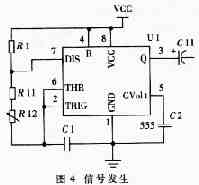
40kHz的超声波信号是由555芯片构成的多谐振荡电路产生的(如图4)。由R1、R11、R12和C1构成外围的充放电电路;当参数漂移时,通过调节R12的阻值,可微调信号的中心频率。
3.2 步进电机驱动
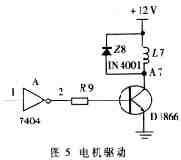
由控制器输出的驱动脉冲信号经7404反向后,驱动功率三极管从而带动步进电机。图5列出了一相的驱动电路。由于有两个步进电机,每一电机按四相八拍制工作,因而共有八组驱动电路。
3.3 控制器
控制器是由MC51单片机构成的。与前述 控制器所完成的三相主要任务相对应的硬件结构分别介绍如下:路选信号由单片机的P1口输出,占用了P1.0~P1.6共6脚。它们直接控制6个模拟开关;步进电机的驱动信号由P2口输出,P2.0~P2.3控制步进电机A,P2.4~P2.7控制步进电机B;超声返回信号经放大、滤波、检波后,引入单片机的中断口,激励相应的中断处理程序。
4 系统性能及特点
从以上介绍可以看出,新一代的智能吸尘器通过将MC51单片微机与自身相结合,极大地提高了产品的可塑性,适应于高层次的开发与应用。它在完成超声避障的基础上,初步实现了无人干预下的自主工作方式,同时由于特殊的驱动结构的设计,实现零半径的转弯,因而具有智能化、高效性、轻便、灵巧等特点,是较新的发展方向。
环球小编收集到吸尘器相关的品牌排行,前十名分别是:福维克Vorwerk,龙的LONGDE,科沃斯ECOVACS,伊莱克斯,LG电子,榜单定期更新,记得关注喔,如果想查看更多《智能吸尘器设计 智能吸尘器的开发》相关的文章,可以留意右侧的推送。